

Semua produk
-
Motor DC Brushless
-
Motor Magnet Permanen Tanpa Sikat
-
Motor Tanpa Sikat Gearbox
-
Gearbox Stepper Motor
-
Motor Stepper Hibrida
-
Gearbox Peredam Planet
-
Motor Stepper Linear
-
Motor Servo Tanpa Bingkai
-
Motor roller konveyor
-
Motor Roda Cacing DC
-
Pengontrol Motor Stepper
-
Pengemudi motor BLDC
-
Motor Stepper Terintegrasi
-
Dc Brush Gear Motor
-
AC Servo Motor
-
 Batang S ****Saya membeli 3 paket stepper yang lebih kecil untuk proyek ender 3 pro saya saat ini.
Batang S ****Saya membeli 3 paket stepper yang lebih kecil untuk proyek ender 3 pro saya saat ini. -
Sam N ***Ini adalah motor yang hebat dan sangat kuat.
-
Jim S **Harap kembangkan lebih banyak kotak roda gigi rendah kebisingan dan dengan harga yang lebih baik, sehingga kami dapat menjual produk Anda ke lebih banyak klien dan mendapatkan pasar yang lebih besar.
Kontak Person :
Nora
ada apa :
+8618661153149
Motor Stepper Mikro DC 5V 57mm Nema 23 1a 1,8 0,58 Nm 516 Oz Masuk








| Tempat asal | Cina |
|---|---|
| Nama merek | HeTai |
| Sertifikasi | CE ROHS ISO |
| Nomor model | 57BYGN200A |
| Kuantitas min Order | 50 |
| Harga | USD |
| Kemasan rincian | Karton dengan Kotak Busa Dalam, Pallet |
| Waktu pengiriman | 25 hari |
| Syarat-syarat pembayaran | L / C, D / P, T / T, Serikat Barat, MoneyGram |
| Menyediakan kemampuan | 10000 pcs / bulan |

Hubungi saya untuk sampel gratis dan kupon.
ada apa:0086 18588475571
Wechat wechat: 0086 18588475571
Skype: sales10@aixton.com
Jika Anda memiliki masalah, kami menyediakan bantuan online 24 jam.
xDetail produk
| Nama Produk | Motor Melangkah Hibrida | perlawanan | 28Ω |
|---|---|---|---|
| Akurasi Langkah | ± 5% | Suhu sekitar | -20 ℃ ~ + 50 ℃ |
| Induktansi | 30mH | Kekuatan dielektrik | 500VAC 1 menit |
| Resistensi isolasi | 100MΩ Min.500VC DC | Kenaikan suhu | 80 ℃ Maks |
| Kekuatan Radial Maks | 75N (20mm dari flensa depan) | Gaya aksial maks | 15N |
| Menyoroti | NEMA 23 0.58Nm,Nema 23 1a 0.58Nm,5V Stepper Motor 0.58Nm |
||
Deskripsi Produk
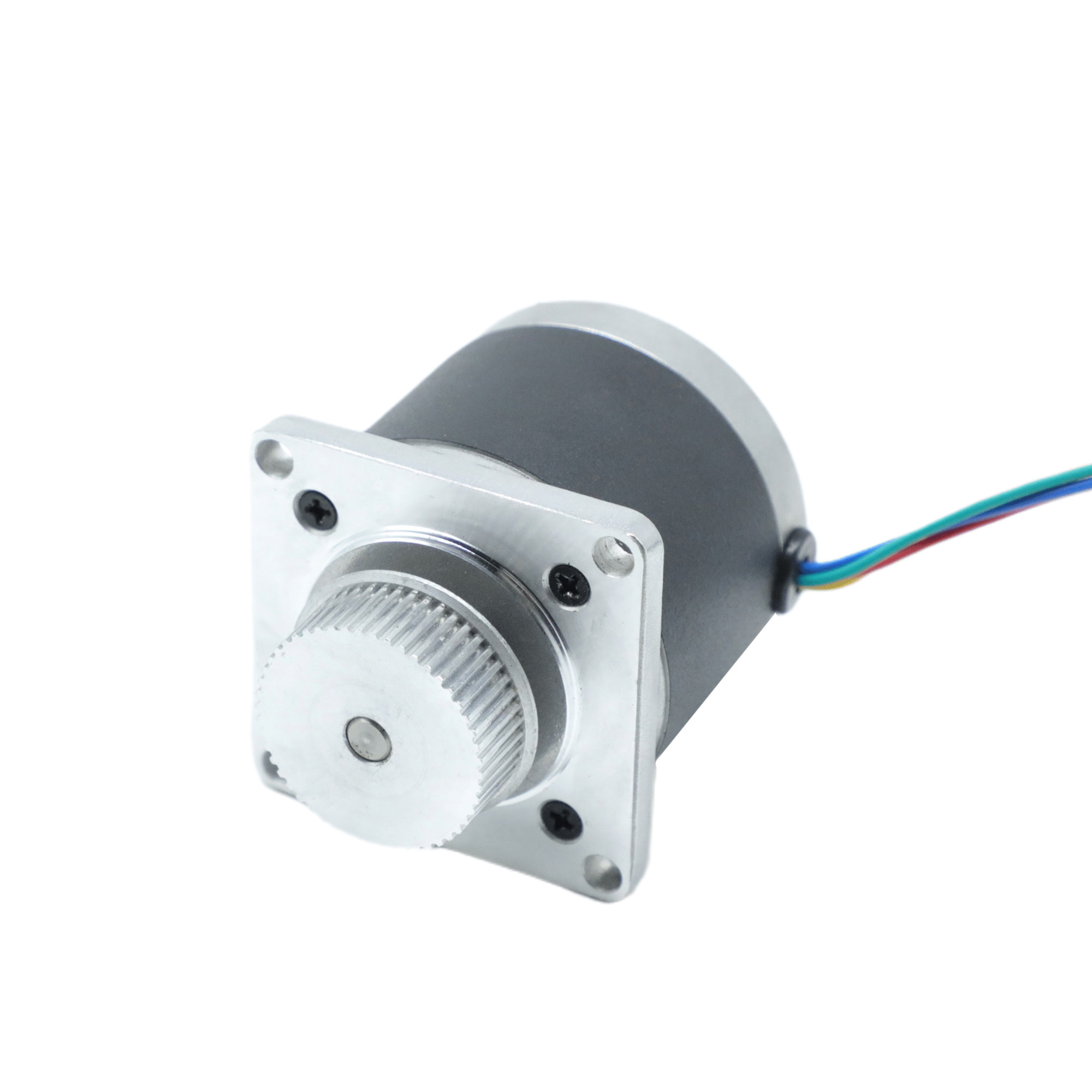
57BYGN200A NEMA 23 1,8 Derajat 0,58 Nm mikro DC 5V Stepper Motor dengan katrol aluminium
KatrolSpesifikasi
Bahan: Aluminium
Jumlah gigi: 50
Tipe Gigi: MXL
Nada: 2.032
Diameter luar: 31.83
Spesifikasi Listrik
|
Nomor model
|
57BYGN200A |
|
Akurasi Langkah
|
± 5%
|
|
Sudut langkah
|
1,8 °
|
|
Kawat timah
|
4 |
|
Tegangan (V)
|
5
|
|
Arus (A/Fase)
|
1
|
|
Memegang Torsi (Nm)
|
0,58
|
| Resistansi (Ω/fase) | 5 |
| Induktansi (mH/fase) | 11.5 |
| Panjang motor (MM) | 51 |
| Berat Motor (Kg) | 0.6 |
| Kelas Isolasi | B |
*Produk dapat disesuaikan dengan permintaan khusus.
Diagram pengkabelan
Dimensi Mekanik
Spesifikasi Model Lain
| MODEL | SUDUT LANGKAH (°/LANGKAH) |
KAWAT TIMAH (TIDAK.) |
TEGANGAN (V) |
ARUS (A/FASE) |
PERLAWANAN (Ω/FASE) |
INDUKTANSI (MH/FASE) |
TAHAN TORSI (KG.CM) |
TINGGI MOTOR L(MM) |
BERAT MOTOR (kg) |
|---|---|---|---|---|---|---|---|---|---|
| 57BYGN001 | 1.8 | 6 | 12 | 0.38 | 32 | 25 | 3.0 | 41 | 0,45 |
| 57BYGN027 | 1.8 | 4 | 2.8 | 1.4 | 2.1 | 3.5 | 3.9 | 41 | 0,45 |
| 57BYGN200-19A | 1.8 | 6 | 5 | 1.0 | 5.0 | 11.5 | 5.8 | 51 | 0,65 |
| 57BYGN204 | 1.8 | 6 | 11.2 | 0.4 | 28 | 30 | 3.8 | 51 | 0,65 |
| 57BYGN400-11A | 1.8 | 4 | 5.5 | 1.1 | 5.0 | 12 | 7.8 | 56 | 0,70 |
| 57BYGN412 | 1.8 | 4 | 4.4 | 2.0 | 2.2 | 6.3 | 9.0 | 56 | 0,70 |
*Produk dapat disesuaikan dengan permintaan khusus.
* Dapat cocok dengan gearbox 42, 52, 56 mm
Berdasarkan semua keunggulan ini, perusahaan kami mengkhususkan diri dalam memproduksi motor stepping hybrid, motor DC brushless, motor servo, motor gearbox, dan sebagainya.Produk ini diaplikasikan pada robot, mesin pengepakan, mesin tekstil, peralatan medis, mesin cetak, peralatan logistik cerdas... Hetai juga mengirimkan produknya ke Amerika Serikat, Eropa, Asia Tenggara, dan seluruh China.
![]()
![]()
Keuntungan:
1. Sudut putaran motor sebanding dengan pulsa input.
2. Motor memiliki torsi penuh saat berhenti (jika belitan diberi energi)
3. Posisi yang tepat dan pengulangan gerakan karena motor stepper yang baik memiliki akurasi 3 – 5% dari satu langkah dan kesalahan ini tidak kumulatif dari satu langkah ke langkah berikutnya.
4. Respon yang sangat baik untuk memulai/menghentikan/membalikkan.
5. Sangat andal karena tidak ada sikat kontak di motor.Oleh karena itu, umur motor sangat bergantung pada umur bantalan.
6. Respons motor terhadap pulsa input digital menyediakan kontrol loop terbuka, membuat motor lebih sederhana dan lebih hemat
mahal untuk dikendalikan.
7. Dimungkinkan untuk mencapai rotasi sinkron kecepatan sangat rendah dengan beban yang langsung digabungkan ke poros.
8. Berbagai kecepatan rotasi dapat direalisasikan karena kecepatan sebanding dengan frekuensi input
pulsa.
Rekomendasi Produk